Check out these great video series that I found on youtube.
I'm watching you

Saturday, August 27, 2011
Saturday, July 16, 2011
Mit robotics Camp
Hi,
As of right now, I am attending a robotic camp at Mit in Cambridge Ma. In the class, we have 3 vex kits. I am learning how to program and build robots. I am having a lot of fun. The first two days we built a car that was controlled by a controller, so it was basically a big, complex rc car. But the next day we worked on making the car autonomous. I added a ultrasound sensor and two bump switches. I also built a robotics arm which consist of two motors with gears and a claw. Here are some photos of the camp/robot:
robot arm:

robot:

robot with robotic arm:

I have been taking notes throughout the camp and recording a journal too. Here is my entries:
Day one, first day of camp
At the camp we introduced ourselves and said our favorite robot. I responded with "Hi, my name is Mark and my favorite robot is R2D2." The other kids introduced themselves and told we they were from too. I was immediately amazed on how far some kids went to get to this camp. One kid was from Taiwan and barely spoke english. A girl was from Spain and was here for the summer.Another boy was from kuwait and I tried very hard but still cannot pronounce his name correctly. Today I learned a lot. One thing that I learned that is very helpful is gear ratio. The larger the gear, the the more torque your going to have and the smaller the gear ratio , the more speed. The forumla to find the gear ratio is number of teeth driven to the number of teeth driving. The robot that I built today two motors on each side, but had a gearing system that allowed the robot to have four wheels. I wrote a simple program in the vex programmer to allow remote control of the robot.I then adjusted my gear ratio of the robot to allow it to have more torque because we were going to have a race. I found a good balance between speed and torque. Our group won the race! After the race I started to work on a claw design. After a lot of tinkering, I got down to business and started to build. I am somewhat happy with the results but I want to modify later and distribute the weight more. Tomorrow I am going to attach it to the robot.
Day two
Today was a frustrating day. We had countless glitches with our microcontroller. Sometime it will work and other times the motors twitch randomly. The good thing is a new microcontroller is going to come tomorrow My claw design worked fairly well, but it isn't very sturdy. But it can pick up and lift water bottles. I also constructed a a sensor bracket for tomorrow's challenge. The challenge consists of programming a robot to follow a line and detect and object. If the robot detects and object it has to take a 90 degree turn. Today I mounted my two degree robotic arm onto my robot. It looks fricken cool and it's pretty effect. Since there was a lot of weight in the front of the robot, we had to balance it out, so we but the heaviest object onto the back, four large wheels. This balanced out the robot. I also learned about sensors, digital and analog. I am not going to write about the different sensors because it would take to long, but I did learn about limit switches, ultrasonic, shaft encoders and more. I am working on a new design for the robotic arm, this plan is going to manage the weight better and add more torque. I am going to add more torque by adding better gears.
Day three
Today we took apart the robot and made it smaller, simpler, and powerful. This robot had two wheels in the front and a makeshift caster in the back. The makeshift caster is basically a bent piece of metal. I added the sensor mount to the robot and it fit perfectly. The sensor mount consist of a line following sensor and a Ultrasonic rangefinder. It took me a little while but I got some code working for the line follower. Today I took apart the robotic arm and re-designed it. I am very happy with the results. This arm is sturdy and has a lot of torque. I will provide a photo of it down below. I am going to add a third degree for rotating the arm. I plan on program it to find a water bottle and then pick it up and rotate the claw and drop the bottle into a recycling bin. I also met a student from worcester polytechnic institute who is taking a class in robotics engineering. I had a great conversation with him talking about the course and his plans. I would like to follow his path and become a robotic engineer. Stay tuned for day four, my last day.
Day 4, Last day
Today we were challenged to complete a course. This course consisted of following a line, taking a right turn, and then going over a bridge, then taking another turn and backing up into a makeshift garage. This course was made on top of a table and the objects were made from cardboard. Our robot was using two line following sensors and a ping sensor. The hardest part for me was defiantly the programing. But we eventually got it and it completed the course. I finished the robot arm and I am very happy with the design and construction. The robot arm has a lot of torque and mobility. Overall the camp was an amazing experience. I learned a lot from programming in c to mechanics and electronics. I met a couple of friends and got some great inspiration to keep on building. I showed my camp instructor some of the robots that I built on this website and he was amazed. I dont have much pictures because my camera died, but I do have two videos. Thanks for looking around here.



Sunday, May 29, 2011

Saturday, April 2, 2011
My first Post
Hello!
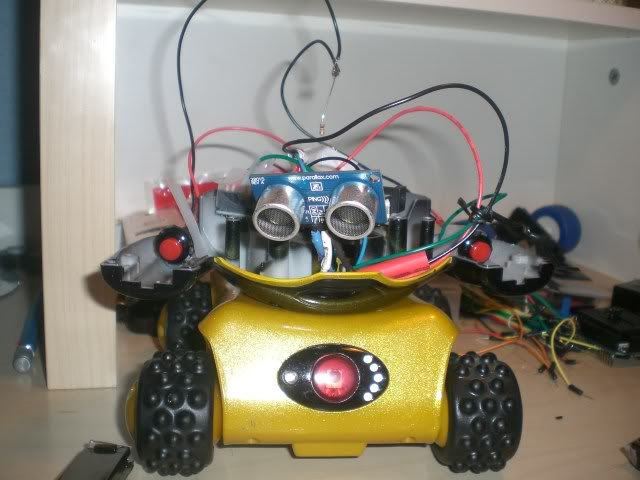
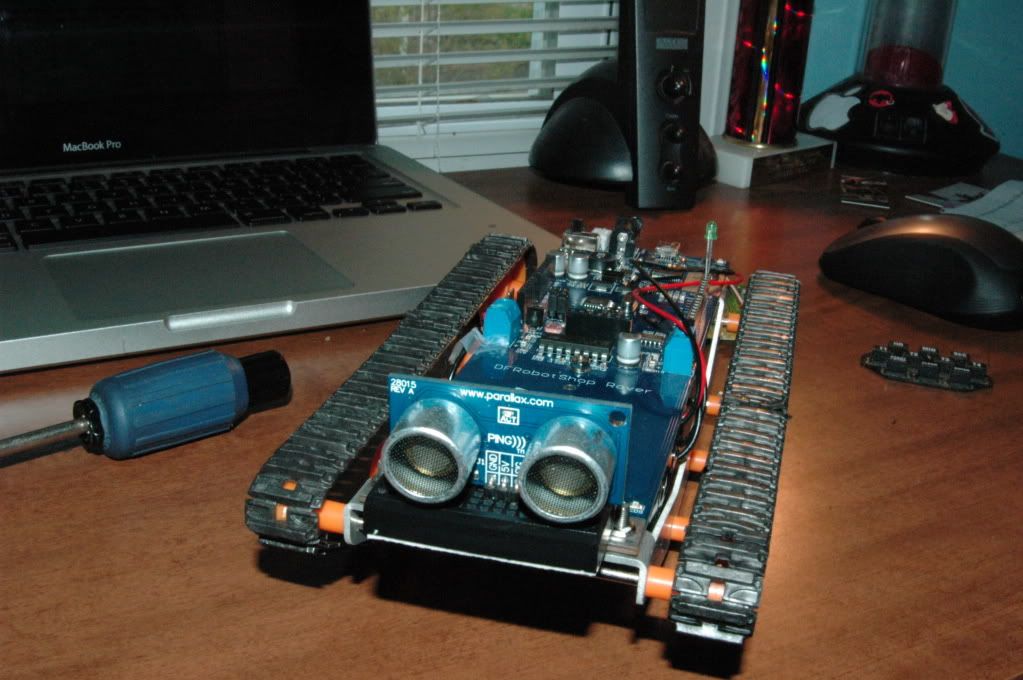
So this is my first blog post. At my blog I am going to show off some of my programs that I'm writing. Also I will be posting info about my robots that I am building. Most of this robots will have an arduino microcontroller. If you want to learn more about the fascinating arduino microcontroller, you can visit their website at http://arduino.cc/ .
So this is my first blog post. At my blog I am going to show off some of my programs that I'm writing. Also I will be posting info about my robots that I am building. Most of this robots will have an arduino microcontroller. If you want to learn more about the fascinating arduino microcontroller, you can visit their website at http://arduino.cc/ .
Subscribe to:
Posts (Atom)